
Latest News
The RAS leadership is delighted to announce the launch of the IEEE RAS Member Support Program. This pilot program is designed to support the member content creators of RAS mission-related activities.
The application deadline is 31 August 2023 (23:59:59 EDT). For more information, including eligibility and application instructions, click here. For questions, please contact ras-msp@ieee.org.
We are pleased to announce that Volume 39, Issue 4 of IEEE Transactions on Robotics (T-RO) is now available on IEEE Xplore. Click here for the Table of Contents and check out the issue now on Xplore!
RAS has developed new video submission guidelines for T-RO, RA-L, T-ASE, and RA-M. Check them out!
![]()
RAS is pleased to present two luncheon networking events for our Members attending the 19th IEEE International Conference on Automation Science and Engineering (CASE) in Auckland, New Zealand. Space is limited for these popular events. Don’t miss the chance to attend, please register in advance.
RAS Lunch with Leaders (LwL) for Students and Young Professionals
 |
Sunday, 27 August 12:30 – 13:30 Gallery Room 4, Cordis Hotel, Auckland, New Zealand |
This luncheon is open to student and young professional attendees. The luncheon offers the chance to meet and interact with leaders from RAS and industry. Informal discussion over lunch will take place round table style. Join us for career advice, insights into where the field is headed, or general conversation to get to know leaders in the field of robotics and automation.
The luncheon is free to attendees, but you must be registered in advance here.
Leaders include George Q. Huang, Weiming Shen, Dawn Tilbury, Birgit Vogel-Heuser, Peter Xu, and more.
RAS Women in Engineering (WIE) Luncheon - Panel Discussion on Diversity
 |
Diversity in Automation Science and Engineering MONDAY, 28 August 12:15 – 13:30 Gallery Room 4, Cordis Hotel, Auckland, New Zealand The WIE luncheon provides the opportunity to foster discussion on the role of women in robotics and automation, inspire girls, and promote collaborations and initiatives to advance women in leadership. The goal for this event is to be not only a lunch for women but, moreover, a lunch with women. Therefore, all are more than welcome to participate and enjoy the discussion. The luncheon is free to attendees, but you must register in advance here. |
We are pleased to announce the call for papers for the 2024 IEEE International Conference on Robotics and Automation (ICRA), which will be held 13-17 May 2024 in Yokohama, Japan.
Check out the website and flyer for more details. Below are some of the key dates and deadlines:
- Paper submission deadline: 15 September 2023
- Workshop/tutorial program submission deadline: 25 September 2023
- Robot competition proposal submission deadline: 15 October 2023
Held as part of ICRA 2023 in London, the inaugural RAS Automation Technical Committee (TC) Cluster Forum convened on 30 May 2023. This groundbreaking event, chaired by Birgit Vogel-Heuser and Angela Faragasso, brought together pioneers in the field of automation. The central theme of this forum was How can automation contribute to a livable and sustainable society in the future? Addressing this question is critical for the world to progress amidst rapid technological advancements.
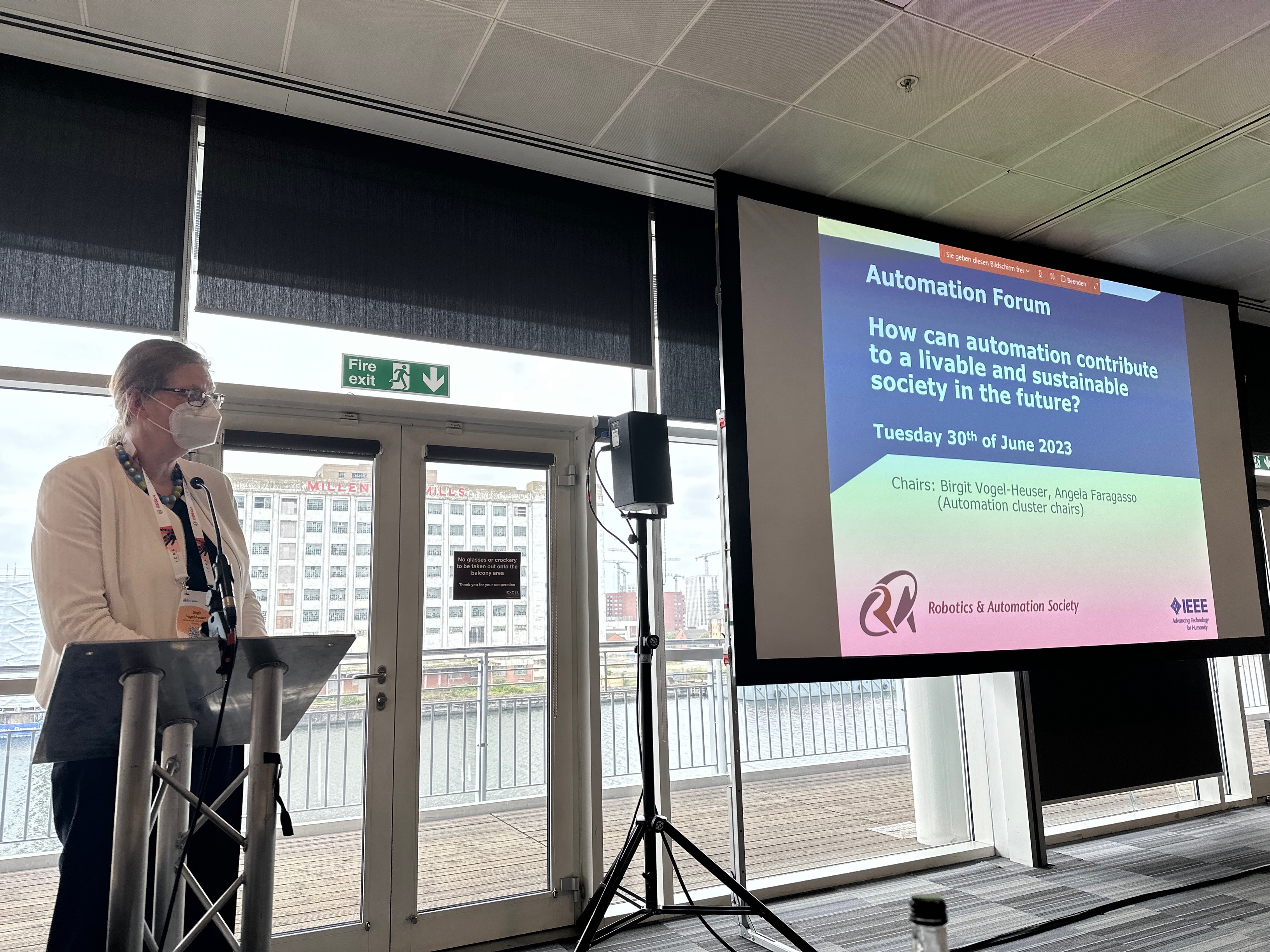
Figure 1. Birgit Vogel-Heuser chaired the 2023 Automation TC Cluster Forum, which featured discussions on how to envision automation for a sustainable future.
A future where operations are dominated by automation is not merely possible—it’s our current trajectory. The forum fostered comprehensive discussions on what society will look like in 2035-2050, resource limitations, social acceptance of autonomous systems, and the sheer scope of fields that automation could revolutionize.
The forum featured a distinguished lineup of speakers from academia and industry who shared their insights on topics including: automation in healthcare, agriculture, and smart buildings; the role of collaborative robots in logistics and manufacturing; human-centered automation; sustainability; and cloud computing. For more details and an in-depth look at the forum’s program, visit the website, where you can also download some of the slides presented during the event.
The RAS Automation TC Cluster plans to address many other pressing topics moving forward. One in particular concerns the usage, benefits, and potential risks of open-source software. By focusing on this topic, the Cluster aims to foster community inclusion in developing new, interconnected systems, and similarly, in defining interfaces to facilitate connectivity between legacy and proprietary systems.
The Automation Cluster looks forward to continuing to engage the RAS community in the future. The Cluster represents a fresh initiative by RAS to merge and coordinate TCs, which will create a more unified front in advancing automation research and applications. The Cluster welcomes feedback and contributions from the community; it hopes to foster an environment of collaboration and innovation.

Figure 2. The audience at the 2023 Automation TC Cluster Forum was engaged and keen to explore the pivotal role of automation in shaping our sustainable future.
Travel Grant applications are now open for the 2023 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) in Detroit, MI, USA!
Supported by the IEEE Robotics and Automation Society (RAS), the IEEE Industrial Electronics Society (IES), the Robotics Society of Japan (RSJ), and Society of Instrument and Control Engineers (SICE), the IROS Travel Grants help defray the costs of attendance at IROS for student authors or authors from developing countries.
The application deadline is 13 August 2023 (23:59:59 EDT). Check out the website and flyer for more details!
Who are the leaders in the robotics and automation field? Who should be honored with a prestigious IEEE RAS Award? Consider nominating them! But hurry, the deadline for IEEE Robotics and Automation Society Award nominations is midnight (US ET) 1 August 2023 1 September 2023. Details for each award, including eligibility and nomination requirements and lists of previous recipients, may be found at www.ieee-ras.org/awards-recognition/society-awards
We are pleased to announce that a new batch of IEEE Robotics and Automation Letters (RA-L) papers is now available on IEEE Xplore. Check it out!
IEEE Robotics & Automation Magazine is soliciting nominations for four new Associate Editors (AEs), to begin in January 2024.
AEs play an important role in maintaining the caliber of the magazine; they ensure the quality of published articles by implementing reviews of technical features according to IEEE guidelines, soliciting interesting and topical material articles for publication in the magazine, guiding the overall direction of the publication, and providing feedback from the readership through e-mail conversations, teleconferences, and twice-yearly in-person meetings held in conjunction with IEEE Conference on Robotics & Automation (ICRA) and the IEEE International Conference on Intelligent Robots and Systems (IROS).
AE terms normally consist of a one-year probation period followed by two years of additional service if performance is satisfactory. Applicants should have a strong technical background and excellent English language skills. Nominations should include a resume (not to exceed three pages), a description of previous experience with publications as a reviewer or in other capacities, and a list of areas of technical expertise. Please submit nominations via the online form.
Nominations are due 1 September 2023.
We are pleased to announce that Volume 20, Issue 3 of IEEE Transactions on Automation Science and Engineering (T-ASE) is now available on IEEE Xplore. Click here for the table of contents and check out the issue now on Xplore!
Zen Koh and his team from Fourier Intelligence won the IEEE/IFR Innovation and Entrepreneurship Award (IERA) for the ArmMotus™ EMU "for the combination of smart adaptive rehabilitation and entertainment technology,” which “can transform our healthcare landscape." The ArmMotus™ EMU is “a 3D back-drivable upper limb rehabilitation robot that adopted an innovative cable-driven mechanism.”
The IERA Award recognizes “the entrepreneurial commercialization of ideas into actual products.” Winners receive $2000 and a plaque; the award is jointly sponsored by the IEEE Robotics and Automation Society (RAS) and the International Federation of Robotics (IFR). It was presented at the ICRA 2023 Awards Ceremony in London.
For more details, check out the piece at IFR.
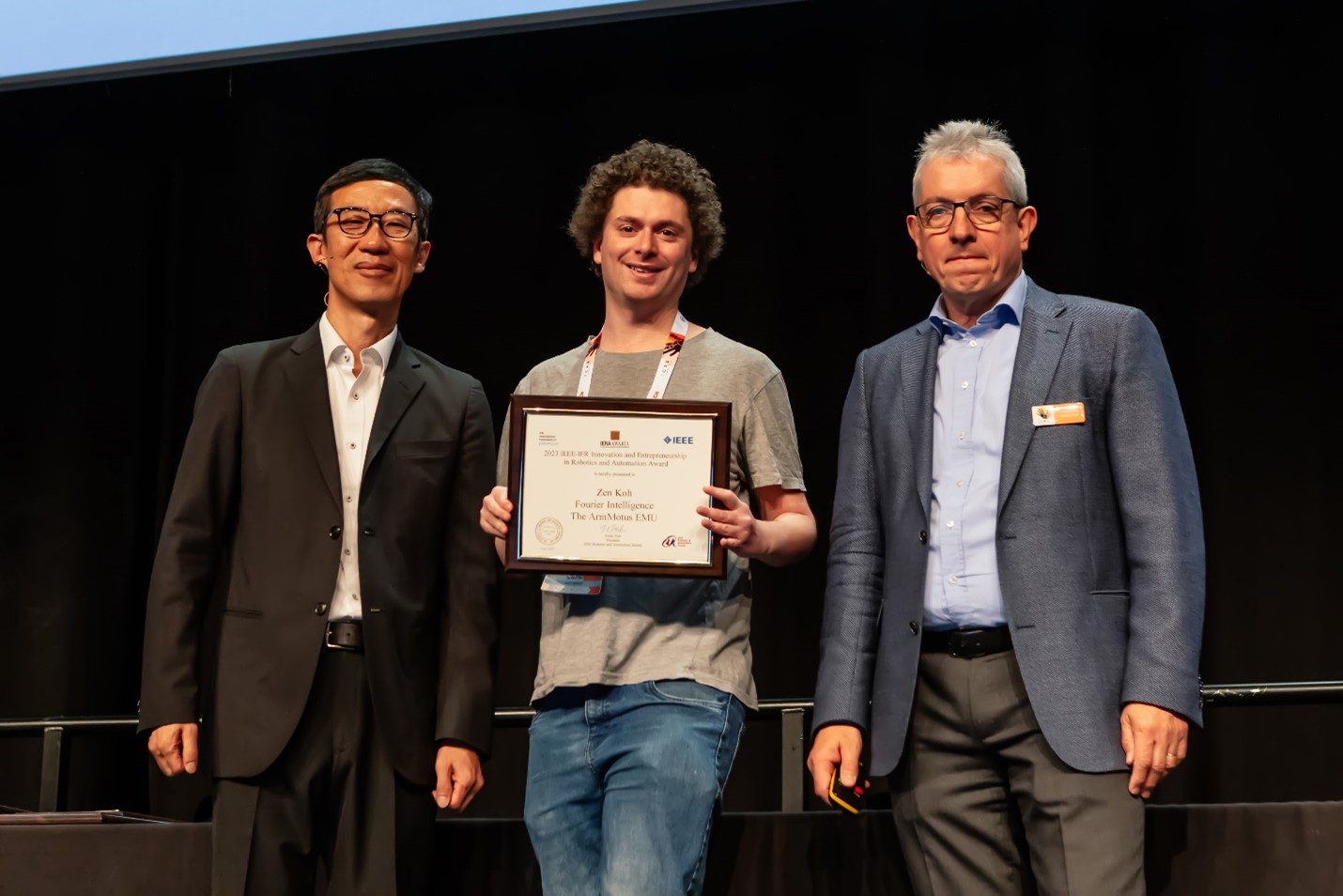
Jonathan Eden, University of Melbourne (center) accepts the IERA Award on behalf of Zen Koh from Frank Park, RAS President (left) and Wolfram Burgard, RAS Awards Chair (right).
The RAS Media Services Board (MSB) and Student Activities Committee (SAC) are searching for social media ambassadors for the upcoming CASE 2023 conference in Auckland, New Zealand. So if you’re a social media–savvy RAS student member planning on attending CASE, apply now! Social Media Ambassadors will receive up to $500 in travel support.
What do we expect? You will meet with the conference publications chair to prepare and post the major announcements before, during, and after the conference. You can apply at this google form.
Congratulations to the 2023 RAS Publications Award Winners for T-RO, T-ASE, RA-L, RA-M, and ToH! More on the RAS Publications Awards, including a list of current and past winners, can be found here.
IEEE Transactions on Robotics King-Sun Fu Memorial Best Paper Award
Yulun Tian, Yun Chang, Fernando Herrera Arias, Carlos Nieto-Granda, Jonathan P. How, and Luca Carlone
"Kimera-Multi: Robust, Distributed, Dense Metric-Semantic SLAM for Multi-Robot Systems"
vol. 38, no. 4, pp. 2022-2038, August 2022
IEEE Transactions on Automation Science and Engineering Best Paper Award
Chen Hou and Qianchuan Zhao
“Optimal Control of Wireless Powered Edge Computing System for Balance Between Computation Rate and Energy Harvested”
vol. 20, no. 2, pp. 1108-1124, 2023
Jiawei Meng, Yuanchang Liu, Richard Bucknall, Weihong Guo, and Ze Ji
“Anisotropic GPMP2: A Fast Continuous-Time Gaussian Processes Based Motion Planner for Unmanned Surface Vehicles in Environments With Ocean Currents”
vol. 19, no. 4, pp. 3914-3931, 2022
IEEE Robotics and Automation Letters Best Paper Award
Karl Van Wyk, Mandy Xie, Anqi Li, Muhammad Asif Rana, Buck Babich, Bryan Peele, Qian Wan, Iretiayo Akinola, Balakumar Sundaralingam, Dieter Fox, Byron Boots, and Nathan D. Ratliff
"Geometric Fabrics: Generalizing Classical Mechanics to Capture the Physics of Behavior"
vol. 7, no. 2, pp. 3202-3209, April 2022
Amy Kyungwon Han, Amar Hajj-Ahmad, and Mark R. Cutkosky
"Bimanual Handling of Deformable Objects With Hybrid Adhesion"
vol. 7, no. 2, pp. 5497-5503, April 2022
Oier Mee, Lukas Hermann, Erick Rosete-Beas, and Wolfram Burgard
"CALVIN: A Benchmark for Language-Conditioned Policy Learning for Long-Horizon Robot Manipulation Tasks"
vol. 7, no. 3, pp. 7327-7334, July 2022
Minho Oh, Euigon Jung, Hyungtae Lim, Wonho Song, Sumin Hu, Eunchang Mason Lee, Junghee Park, Jaekyung Kim, Jangwoo Lee, and Hyun Myung
"TRAVEL: Traversable Ground and Above-Ground Object Segmentation Using Graph Representation of 3D LiDAR Scans"
vol. 7, no. 3, pp. 7255-7262, July 2022
Hwayeong Jeong, Jirou Feng, and Jung Kim
"2.5D Laser-Cutting-Based Customized Fabrication of Long-Term Wearable Textile sEMG Sensor: From Design to Intention Recognition"
vol. 7, no. 4, pp. 10367-10374, October 2022
IEEE Robotics and Automation Magazine Best Paper Award
Tony G. Chen, Abhishek Cauligi, Srinivasan A. Suresh, Marco Pavone, and Mark R. Cutkosky
“Testing Gecko-Inspired Adhesives With Astrobee Aboard the International Space Station: Readying the Technology for Space”
vol. 29, no. 3, pp. 24-133, September 2022
IEEE Transactions on Haptics Best Paper Award
Yongjae Yoo, Inwook Hwang, and Seungmoon Choi
“Perceived Intensity Model of Dual-Frequency Superimposed Vibration: Pythagorean Sum”
vol. 15, no. 2, pp. 405-415, 2022
IEEE Transactions on Haptics Best Application Paper Award (Sponsored by Alps Electric Co.)
Yuki Abe, Yu Someya, Mitsuhiko Shimomura, Task Ohmori, Seki Inoue, Masahiro Fujiwara, Yasutoshi Makino, and Hiroyuki Shinoda
"Remote Friction Reduction on Polystyrene Foam Surface by Focused Airborne Ultrasound"
vol. 15, no. 2, pp. 363-371, 2022
IEEE Robotics and Automation Letters Distinguished Service Award
Outstanding Associate Editor
Matteo Bianchi, University of Pisa, Italy
Georgia Chalvatzaki, TU Darmstadt, Germany
Hamidreza Kasaei, University of Groningen, Netherlands
Kasra Khosoussi, MIT, USA
Hyun-Jung Kim, KAIST, South Korea
Amy LaViers, The RAD Lab, USA
Vesna Novak, University of Cincinnati, USA
Pierre-Brice Wieber, INRIA Grenoble, France
Damiano Zanotto, Stevens Institute of Technology, USA
Zhuoran Zhang, CUHK, China
Outstanding Reviewer
Quentin Boehler, ETH Zurich, Switzerland
Yunteng Cao, MIT, USA
Simone Fani, University of Pisa, Italy
Kenji Koide, AIST, Japan
Guoyuan Li, NTNU, Norway
Xiaomin Liu, Beihua University, China
Khadiv Majid, Max Planck Institute, Germany
Guanqiao Shan, University of Toronto, Canada
Yulun Tian, MIT, USA
Jun Zhang, NTU, Singapore
We are pleased to announce that Volume 16, Issue 2 of IEEE Transactions on Haptics (ToH) is now available on IEEE Xplore. Click here for the Table of Contents, and check out the issue now!
Two distinguished RAS members were recently honored with awards from MassRobotics on 1 June at the Awards Ceremony at the 2023 IEEE International Conference on Robotics and Automation (ICRA) in London.
Nancy Amato, Abel Bliss Professor of Engineering and Head of the Computer Science Department at the University of Illinois at Urbana-Champaign, received the inaugural Robotics Medal.
Alyssa Pierson, Assistant Professor of Mechanical Engineering and Chief Scientist at Ava Robotics, received the inaugural Rising Star Award.
You can read more about these awards and Professors Amato’s and Pierson’s achievements here.

Nancy Amato receives the Robotics Medal from MassRobotics.

Alyssa Pierson receives the Rising Star Award from MassRobotics.
On 1 June 2023, at the IEEE International Conference on Robotics and Automation (ICRA) in London, RAS and ICRA honored recipients and finalists for RAS and ICRA Awards. Check out the full list of honorees, including finalists, here; RAS extends its hearty congratulations to all those honored, and we thank everyone who helped organize this wonderful celebration.
Note also that the nominations deadline for 2024 RAS Awards is fast approaching! Details for each award, including eligibility and nomination requirements and lists of previous recipients, may be found here. The deadline is midnight (ET) (1 August) 2023.
Below is the list of ICRA Award winners.
ICRA 2023 Outstanding Paper
Winner: “Distributed Data-Driven Predictive Control for Multi-Agent Collaborative Legged Locomotion”
Authors: Fawcett, Randall; Amanzadeh, Leila; Kim, Jeeseop; Ames, Aaron; Akbari Hamed, Kaveh
ICRA 2023 Outstanding Automation Paper
Winner: “Target-Aware Implicit Mapping for Agricultural Crop Inspection”
Authors: Kelly, Shane; Riccardi, Alessandro; Marks, Elias Ariel; Magistri, Federico; Guadagnino, Tiziano; Chli, Margarita; Stachniss, Cyrill
ICRA 2023 Outstanding Student Paper
WINNER: “Robust Locomotion on Legged Robots through Planning on Motion Primitive Graphs”
Authors: Ubellacker, Wyatt; Ames, Aaron
ICRA 2023 Outstanding Deployed Systems Paper
WINNER: “GUTS: Generalized Uncertainty-Aware Thompson Sampling for Multi-Agent Active Search”
Authors: Bakshi, Nikhil Angad; Gupta, Tejus; Ghods, Ramina; Schneider, Jeff
ICRA 2023 Outstanding Dynamics and Control Paper
WINNER: “Nonlinear Model Predictive Control of a 3D Hopping Robot: Leveraging Lie Group Integrators for Dynamically Stable Behaviors”
Authors: Csomay-Shanklin, Noel; Dorobantu, Victor; Ames, Aaron
ICRA 2023 Outstanding Healthcare and Medical Robotics Paper
WINNER: “Real-Time Constrained 6D Object-Pose Tracking of an In-Hand Suture Needle for Minimally Invasive Robotic Surgery”
Authors: Chiu, Zih-Yun; Richter, Florian; Yip, Michael C.
ICRA 2023 Outstanding Locomotion Paper
WINNER: “Multi-Segmented, Adaptive Feet for Versatile Legged Locomotion in Natural Terrain”
Authors: Chatterjee, Abhishek; Mo, An; Kiss, Bernadett; Gönen, Emre Cemal; Badri-Spröwitz, Alexander
ICRA 2023 Outstanding Manipulation Paper
WINNER: “In-Hand Manipulation in Power Grasp: Design of an Adaptive Robot Hand with Active Surfaces”
Authors: Cai, Yilin; Yuan, Shenli
ICRA 2023 Outstanding Mechanisms and Design Paper
WINNER: “Contact Force Control with Continuously Compliant Robotic Legs”
Authors: Bendfeld, Robin; Remy, C. David
ICRA 2023 Outstanding Multi-Robot Systems Paper
WINNER: “Graph Neural Networks for Multi-Robot Active Information Acquisition”
Authors: Tzes, Mariliza; Bousias, Nikolaos; Chatzipantazis, Evangelos; Pappas, George J.
ICRA 2023 Outstanding Navigation Paper
WINNER: “SmartRainNet: Uncertainty Estimation for Laser Measurement in Rain”
Authors: Zhang, Chen; Huang, Zefan; Tung, Beatrix; Ang Jr, Marcelo H; Rus, Daniela
ICRA 2023 Outstanding Physical Human-Robot Interaction Paper
WINNER: “Learning from Physical Human Feedback: An Object-Centric One-Shot Adaptation Method”
Authors: Shek, Alvin; Su, Bo Ying; Chn Rui; Liu, Changliu
ICRA 2023 Outstanding Planning Paper
WINNER: “Learning-Based Initialization of Trajectory Optimization for Path-Following Problems of Redundant Manipulators”
Authors: Yoon, Minsung; Kang, Mincheul; Park, Daehyung; Yoon, Sung-eui
ICRA 2023 Outstanding Robot Learning Paper
WINNER: “Code As Policies: Language Model Programs for Embodied Control”
Authors: Liang, Jacky; Huang, Wenlong; Xia, Fei; Xu, Peng; Hausman, Karol; Ichter, Brian; Florence, Peter; Zeng, Andy
ICRA 2023 Outstanding Sensors and Perception Paper
WINNER: “Occlusion Reasoning for Skeleton Extraction of Self-Occluded Tree Canopies”
Authors: Kim, Chung Hee; Kantor, George

Daniela Rus accepts the 2023 Robotics and Automation Technical Field Award from RAS President Frank Park

Kevin Lynch, the outgoing Editor-in-Chief (EiC) of IEEE Transactions on Robotics (T-RO), is honored by Frank Park, RAS President and past T-RO EiC, and Wolfram Burgard, RAS Awards Chair and incoming T-RO EiC

Congratulations to all the honorees at the ICRA 2023 Awards Ceremony
We are pleased to announce that a new batch of IEEE Robotics and Automation Letters (RA-L) papers is now available on IEEE Xplore. Check it out!
We are pleased to announce that the June 2023 issue of IEEE Robotics & Automation Magazine on Machine Learning for Industry 4.0 (Volume 30, Issue 2) is now available on IEEE Xplore. Click here for the table of contents, and check out the issue now on Xplore!
Registration for the 2023 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) is now open. IROS 2023 will take place 1–5 October 2023 in Detroit, Michigan, USA; the theme is The Next Generation of Robotics.
The author registration deadline is 31 July 2023; the early bird registration deadline is 15 August 2023.
Check out the website for details on registration, accommodation, and more!


